基于halcon视觉库开发的3D点云数据读取,并实时显示3D点云模型,提供了开发的所有源代码,包括读取点云数据的源代码
”3D电云 3D视觉 机器视觉 3D点云模型“ 的搜索结果

3D点云模型总结点云数据预处理 FAQ1. 点云有哪些常用的数据集?2. 点云中点的个数如何确定?3. 如何划分train/val/test ?4. 如何归一化?5. 如何shuffle?6. 数据增强(augmentation)Farthest Point Sampling (FPS...
Open3D 是一个开源库,使开发人员能够处理 ...它提供了一组用于 3D 数据处理、可视化和机器学习任务的工具。该库支持各种数据格式,例如 .ply、.obj、.stl 和 .xyz,并允许用户创建自定义数据结构并在程序中访问它们。
添加微信:dddvisiona,备注:3D点云,拉你入群。文末附行业细分群。一、笔者个人体会文章的主要动机是解决点云数据处理中的挑战性问题。点云数据具有复杂的非欧几里德结构,包含了全局和局部的几何信息,而现有的...

点云是表示 3D 坐标系中的数字 3D 物理对象或空间的点数据库。它由数百万或者更多个...3D 机器视觉以适合计算机或 PAC/PLC 处理的格式捕获对象的位置和形状。对象的表面由三维坐标列表(X、Y、Z)表示,称为“点云”。
为此提出了一种基于散斑视觉测量的叶片模型重构方法。采用散斑视觉系统采集叶片曲面散斑点; 通过散斑点立体匹配得到局部点云数据; 通过点云拼接得出叶片整体点云; 根据叶片点云曲率提取边界点, 通过三次B样条曲线对...
MVF论文阅读

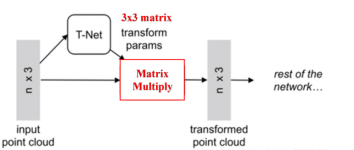
总结一下,PointNet为3D点云分割、分类开拓了一条新的道路,也就是Point-base的方法。从对体素voxel的处理转为对点point进行直接处理,提高了效率,同时也获得十分优秀的效果。PointNet中出彩的地方包括使用T-Net来...


点击下方卡片,关注「3D视觉工坊」公众号选择星标,干货第一时间送达来源:3D视觉工坊添加小助理:dddvision,备注:点云检测,拉你入群。文末附行业细分群论文题目:ADVANCEMENTS IN POINT CLOUD-BASED 3D DEFECT ...


点击上方“3D视觉工坊”,选择“星标”干货第一时间送达作者丨柒柒@知乎来源丨https://zhuanlan.zhihu.com/p/436452723编辑丨3D视觉工坊前段时间比较忙,鸽...
3D点云语义分割——场景理解的关键 https://www.zhihu.com/search?type=content&q=3D%E8%AF%AD%E4%B9%89%E5%88%86%E5%89%B2 数据: 点云数据是什么?点云数据一般由激光雷达等3D扫描设备获取空间若干点的...



三维点云机器学习检测定位圆心,三维圆检测,拟合轴线(基于open3d和python)
为了进一步提高大规模多种类点云模型识别与分类的准确率,提出了一种K近邻卷积神经网络模型。首先,利用最远点采样算法对点云模型均匀采样;其次,对采样后的点云模型用K近邻算法构建每个点的局部邻域,为防止信息的非...
它可以在一个瞬间同时捕捉到物体的深度和颜色信息,并用这些数据创建一个三维模型。能够捕获物体的更详细信息,包括其尺寸、形状和位置,这对于工业环境中的搬运和其他操作至关重要。该技术已广泛应用于制造和物流...
三维坐标系统、深度信息、视锥体、摄像机标定、传感器、点云处理、特征提取与匹配、三维重建、物体检测和跟踪、三维场景渲染、3D 视觉应用

最后,对测试数据进行稀疏表示,并确定点云模型中每个点所属的类别,将同类点划分到同一区域以得到协同分割结果。实验结果表明,算法在ShapeNet Parts数据集上的分割准确率达到了85.7%。所构建的协同分割算法能够有效地...
提出了一种基于模糊熵迭代的点云精简算法,在提高算法运行效率的同时,获得的精简点云模型具有更好的细节特征。对所有点云数据进行快速X-Y边界提取以保留点云边界特征;计算所有数据点的曲率,将除边界外的数据点...
丶布布转载注明出处。
推荐文章
- cocos creator 实现截屏截图切割转成 base64分享--facebook小游戏截图base64分享,微信小游戏截图分享【白玉无冰】每天进步一点点_cocos上传base64-程序员宅基地
- Docker_error running 'docker: compose deployment': server-程序员宅基地
- ChannelSftp下载目录下所有或指定文件、ChannelSftp获取某目录下所有文件名称、InputStream转File_channelsftp.lsentry获取文件全路径-程序员宅基地
- Hbase ERROR: Can‘t get master address from ZooKeeper; znode data == null 解决方案_error: can't get master address from zookeeper; zn-程序员宅基地
- KMP的最小循环节_kmp求最小循环节-程序员宅基地
- 详解ROI-Pooling与ROI-Align_roi pooling和roi align-程序员宅基地
- Imx6ull开发板Linux常用查看系统信息指令_armv7 processor rev 2 (v7l)-程序员宅基地
- java SSH面试资料-程序员宅基地
- ant design vue table 高度自适应_对比1万2千个Vue.js开源项目发现最实用的 TOP45!火速拿来用!...-程序员宅基地
- 程序员需要知道的缩写和专业名词-程序员宅基地